检测小目标¶
本指南将展示如何使用 InferenceSlicer
在 Inference,
Ultralytics 或
Transformers 包中检测小目标。
基线检测¶
高分辨率图像中的小目标检测由于目标相对于图像分辨率的大小而带来挑战。
import cv2
import supervision as sv
from inference import get_model
model = get_model(model_id="yolov8x-640")
image = cv2.imread(<SOURCE_IMAGE_PATH>)
results = model.infer(image)[0]
detections = sv.Detections.from_inference(results)
box_annotator = sv.BoxAnnotator()
label_annotator = sv.LabelAnnotator()
annotated_image = box_annotator.annotate(
scene=image, detections=detections)
annotated_image = label_annotator.annotate(
scene=annotated_image, detections=detections)
import cv2
import supervision as sv
from ultralytics import YOLO
model = YOLO("yolov8x.pt")
image = cv2.imread(<SOURCE_IMAGE_PATH>)
results = model(image)[0]
detections = sv.Detections.from_ultralytics(results)
box_annotator = sv.BoxAnnotator()
label_annotator = sv.LabelAnnotator()
annotated_image = box_annotator.annotate(
scene=image, detections=detections)
annotated_image = label_annotator.annotate(
scene=annotated_image, detections=detections)
import torch
import supervision as sv
from PIL import Image
from transformers import DetrImageProcessor, DetrForSegmentation
processor = DetrImageProcessor.from_pretrained("facebook/detr-resnet-50")
model = DetrForSegmentation.from_pretrained("facebook/detr-resnet-50")
image = Image.open(<SOURCE_IMAGE_PATH>)
inputs = processor(images=image, return_tensors="pt")
with torch.no_grad():
outputs = model(**inputs)
width, height = image_slice.size
target_size = torch.tensor([[width, height]])
results = processor.post_process_object_detection(
outputs=outputs, target_sizes=target_size)[0]
detections = sv.Detections.from_transformers(results)
box_annotator = sv.BoxAnnotator()
label_annotator = sv.LabelAnnotator()
labels = [
model.config.id2label[class_id]
for class_id
in detections.class_id
]
annotated_image = box_annotator.annotate(
scene=image, detections=detections)
annotated_image = label_annotator.annotate(
scene=annotated_image, detections=detections, labels=labels)

输入分辨率¶
在检测前修改图像的输入分辨率可以提高小目标的识别能力,但会以牺牲处理速度和增加内存使用为代价。对于超高分辨率图像(4K 及以上),此方法效果较差。
import cv2
import supervision as sv
from inference import get_model
model = get_model(model_id="yolov8x-1280")
image = cv2.imread(<SOURCE_IMAGE_PATH>)
results = model.infer(image)[0]
detections = sv.Detections.from_inference(results)
box_annotator = sv.BoxAnnotator()
label_annotator = sv.LabelAnnotator()
annotated_image = box_annotator.annotate(
scene=image, detections=detections)
annotated_image = label_annotator.annotate(
scene=annotated_image, detections=detections)
import cv2
import supervision as sv
from ultralytics import YOLO
model = YOLO("yolov8x.pt")
image = cv2.imread(<SOURCE_IMAGE_PATH>)
results = model(image, imgsz=1280)[0]
detections = sv.Detections.from_ultralytics(results)
box_annotator = sv.BoxAnnotator()
label_annotator = sv.LabelAnnotator()
annotated_image = box_annotator.annotate(
scene=image, detections=detections)
annotated_image = label_annotator.annotate(
scene=annotated_image, detections=detections)

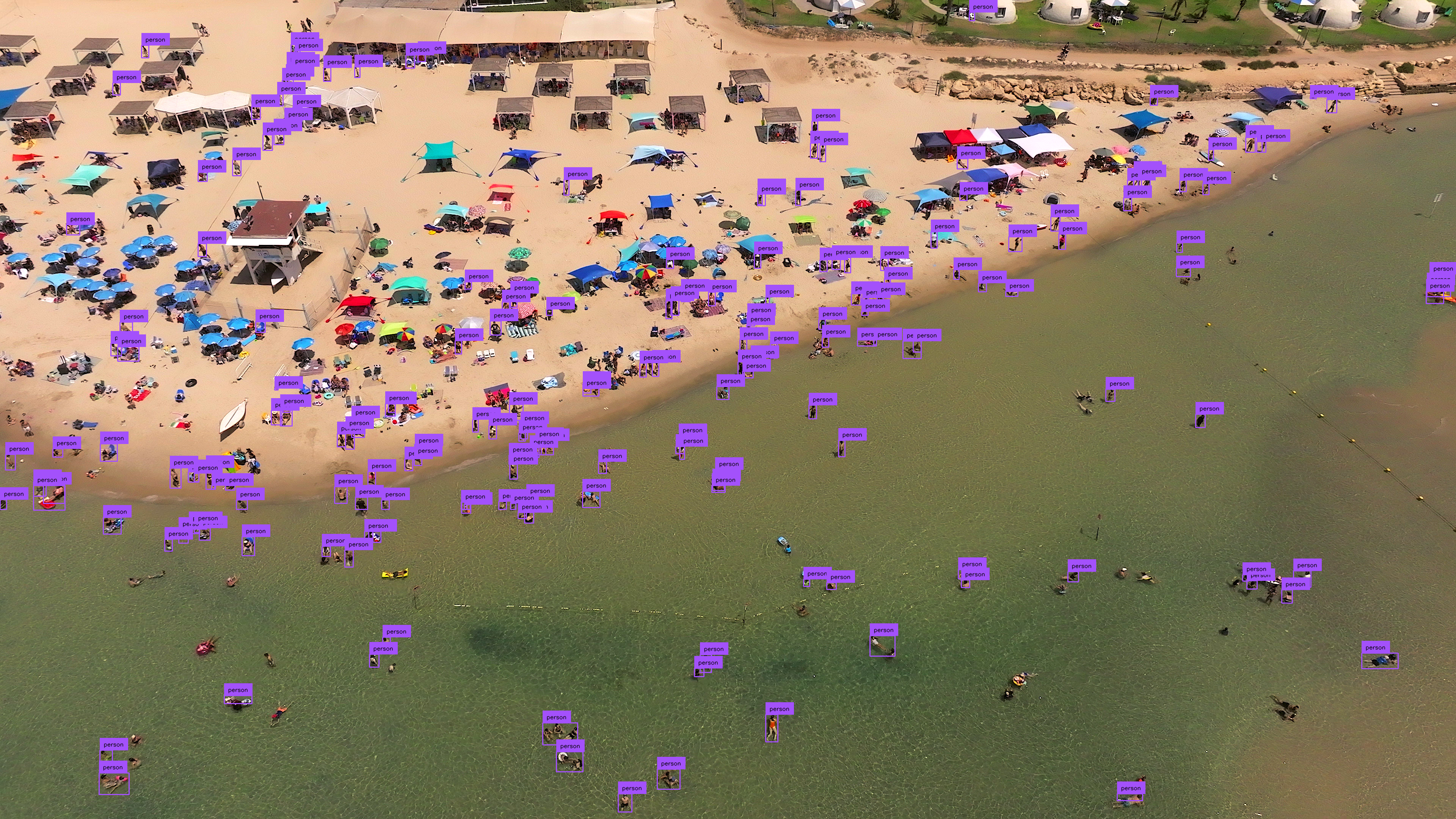
Inference Slicer¶
InferenceSlicer
通过将高分辨率图像分割成更小的块、对每个块进行检测然后聚合结果来处理高分辨率图像。
import cv2
import numpy as np
import supervision as sv
from inference import get_model
model = get_model(model_id="yolov8x-640")
image = cv2.imread(<SOURCE_IMAGE_PATH>)
def callback(image_slice: np.ndarray) -> sv.Detections:
results = model.infer(image_slice)[0]
return sv.Detections.from_inference(results)
slicer = sv.InferenceSlicer(callback = callback)
detections = slicer(image)
box_annotator = sv.BoxAnnotator()
label_annotator = sv.LabelAnnotator()
annotated_image = box_annotator.annotate(
scene=image, detections=detections)
annotated_image = label_annotator.annotate(
scene=annotated_image, detections=detections)
import cv2
import numpy as np
import supervision as sv
from ultralytics import YOLO
model = YOLO("yolov8x.pt")
image = cv2.imread(<SOURCE_IMAGE_PATH>)
def callback(image_slice: np.ndarray) -> sv.Detections:
result = model(image_slice)[0]
return sv.Detections.from_ultralytics(result)
slicer = sv.InferenceSlicer(callback = callback)
detections = slicer(image)
box_annotator = sv.BoxAnnotator()
label_annotator = sv.LabelAnnotator()
annotated_image = box_annotator.annotate(
scene=image, detections=detections)
annotated_image = label_annotator.annotate(
scene=annotated_image, detections=detections)
import cv2
import torch
import numpy as np
import supervision as sv
from PIL import Image
from transformers import DetrImageProcessor, DetrForObjectDetection
processor = DetrImageProcessor.from_pretrained("facebook/detr-resnet-50")
model = DetrForObjectDetection.from_pretrained("facebook/detr-resnet-50")
image = cv2.imread(<SOURCE_IMAGE_PATH>)
def callback(image_slice: np.ndarray) -> sv.Detections:
image_slice = cv2.cvtColor(image_slice, cv2.COLOR_BGR2RGB)
image_slice = Image.fromarray(image_slice)
inputs = processor(images=image_slice, return_tensors="pt")
with torch.no_grad():
outputs = model(**inputs)
width, height = image_slice.size
target_size = torch.tensor([[width, height]])
results = processor.post_process_object_detection(
outputs=outputs, target_sizes=target_size)[0]
return sv.Detections.from_transformers(results)
slicer = sv.InferenceSlicer(callback = callback)
detections = slicer(image)
box_annotator = sv.BoxAnnotator()
label_annotator = sv.LabelAnnotator()
labels = [
model.config.id2label[class_id]
for class_id
in detections.class_id
]
annotated_image = box_annotator.annotate(
scene=image, detections=detections)
annotated_image = label_annotator.annotate(
scene=annotated_image, detections=detections, labels=labels)
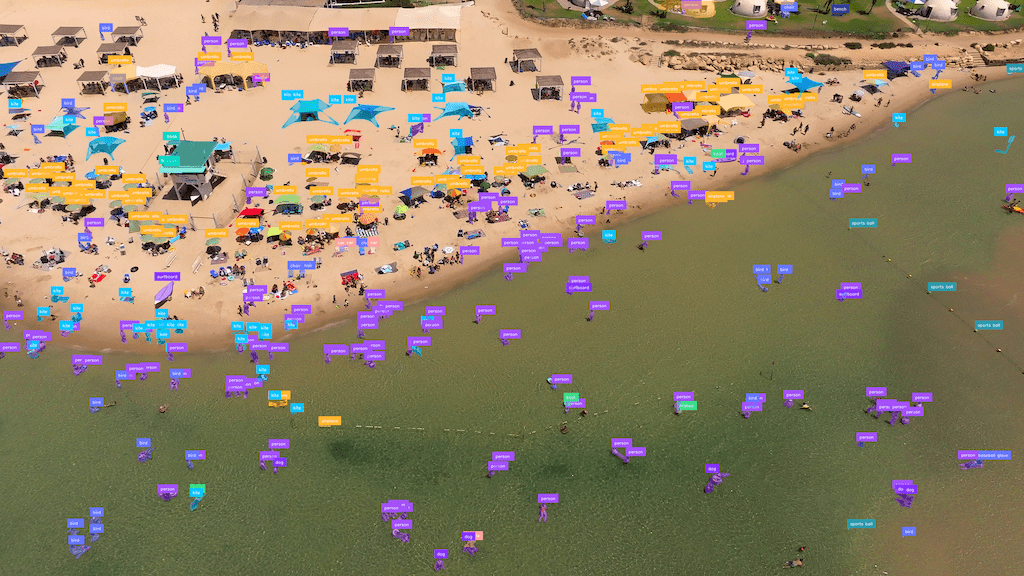
小目标分割¶
InferenceSlicer 也可以执行分割任务。
import cv2
import numpy as np
import supervision as sv
from inference import get_model
model = get_model(model_id="yolov8x-seg-640")
image = cv2.imread(<SOURCE_IMAGE_PATH>)
def callback(image_slice: np.ndarray) -> sv.Detections:
results = model.infer(image_slice)[0]
return sv.Detections.from_inference(results)
slicer = sv.InferenceSlicer(callback = callback)
detections = slicer(image)
mask_annotator = sv.MaskAnnotator()
label_annotator = sv.LabelAnnotator()
annotated_image = mask_annotator.annotate(
scene=image, detections=detections)
annotated_image = label_annotator.annotate(
scene=annotated_image, detections=detections)
import cv2
import numpy as np
import supervision as sv
from ultralytics import YOLO
model = YOLO("yolov8x-seg.pt")
image = cv2.imread(<SOURCE_IMAGE_PATH>)
def callback(image_slice: np.ndarray) -> sv.Detections:
result = model(image_slice)[0]
return sv.Detections.from_ultralytics(result)
slicer = sv.InferenceSlicer(callback = callback)
detections = slicer(image)
mask_annotator = sv.MaskAnnotator()
label_annotator = sv.LabelAnnotator()
annotated_image = mask_annotator.annotate(
scene=image, detections=detections)
annotated_image = label_annotator.annotate(
scene=annotated_image, detections=detections)